Wednesday Seminars | Department of Computer Science | University of Cambridge
Geometric Gaussian Processes
Viacheslav (Slava) Borovitskiy
https://vab.im

Outline
Background:
Probabilistic models
- Motivation: Model-based decision-making
- Basic types of probabilistic models
- Probabilistic models on geometric domains
- Motivating geometric Gaussian processes: A benchmark
Geometric Gaussian processes
- Theory
- Various geometric settings
- Implementation
Summary
Probabilistic models
Motivation:
Model-based decision-making
Model-based decision-making
Probabilistic models: input ⟶ distribution (prediction + uncertainty)
Allows computing queries like probability of improvement: $\!\alpha(x) \!=\! \mathbb{P} \! \del{f(x) \!>\!\! f^*}$
They can drive selection of the next point to evaluate [Bayesian optimization]
Basic types of probabilistic models
Basic types of probabilistic models

Bayesian neural networks

Deep ensembles
$\underbrace{\hphantom{\text{Bayesian Neural Networks}\qquad{Deep ensembles}}}_{\text{defined by architectures}}$

Gaussian processes
$\underbrace{\hphantom{\text{Gaussian Processes}}}_{\text{defined by kernels}}$
Basic types of probabilistic models: Discussion
Gaussian processes (GPs) — gold standard.
In practice: General-purpose Gaussian processes (RBF and Matérn kernels).
-
Inductive bias:
- Stationarity: training on a shifted data produces a shifted model.
- Smoothness: continuity and differentiability.
- Scope:
- Work very well in low dimensions (e.g. tabular data).
-
Struggle in high dimensions (e.g. image / text data).
Though deep ensembles and Bayesian neural networks struggle too!
Geometric GPs: extend scope to geometric settings.
Probabilistic models
on
Geometric domains
Geometric domains
Manifolds
e.g. for robotics
(analytic or meshes)
Graphs
e.g. for road networks
(graphs: transductive)

Spaces of graphs
e.g. for drug design
(graphs: inductive)
Example graph learning problem
Example graph learning problem
: Node regression
$$ f : V \to \R $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g1.svg}}\Big) = 2 $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g2.svg}}\Big) = 3 $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g3.svg}}\Big) = 5 $$
Example graph learning problem: Probabilistic node regression
$$ f : V \to \text{distributions over } \R $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g1.svg}}\Big) = \f{N}(2, 0.5^2) $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g2.svg}}\Big) = \f{N}(3, 0.2^2) $$
$$ f\Big(\smash{\includegraphics[height=2.75em,width=1.5em]{figures/g3.svg}}\Big) = \f{N}(5, 0.7^2) $$
Benchmark
Reminder: Basic types of probabilistic models
Bayesian neural networks
Deep ensembles
$\underbrace{\hphantom{\text{Bayesian Neural Networks}\qquad{Deep ensembles}}}_{\text{defined by architectures}}$
Gaussian processes
$\underbrace{\hphantom{\text{Gaussian Processes}}}_{\text{defined by kernels}}$
Benchmark: Data
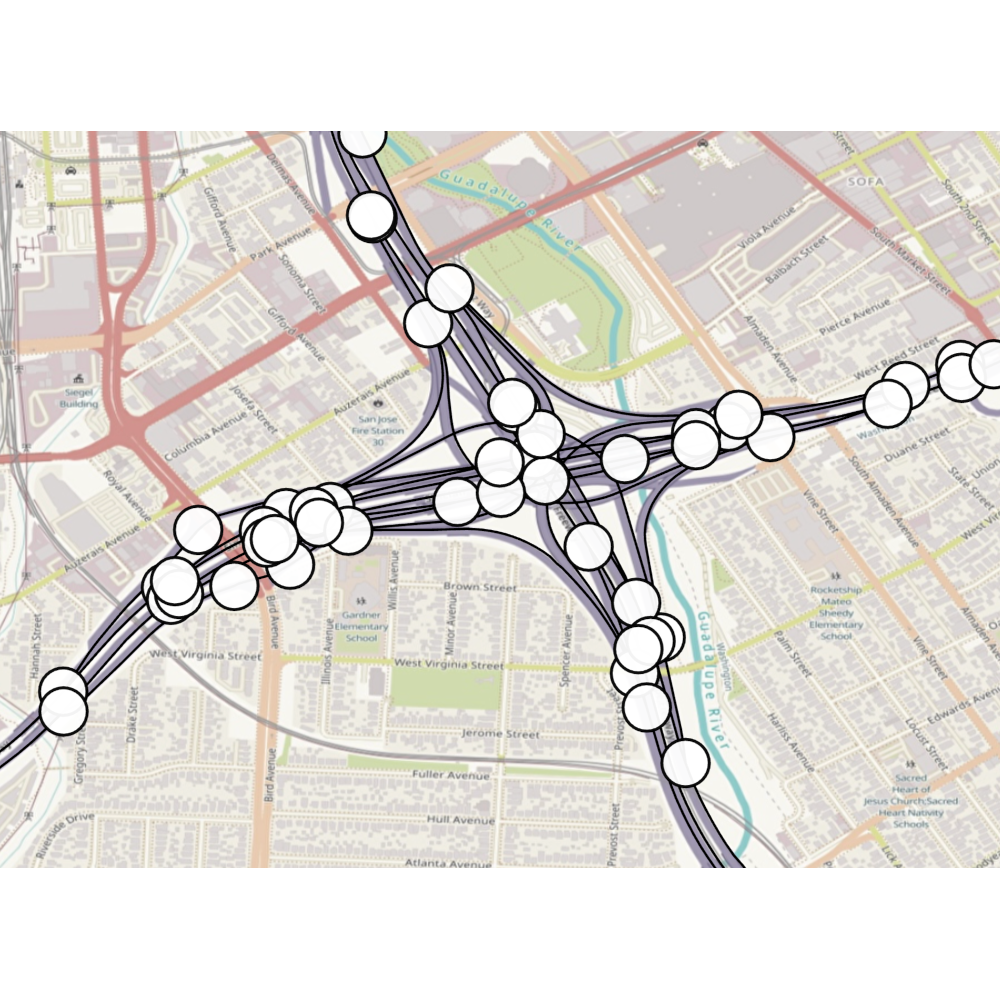
Benchmark: Caltrans Performance Measurement System (PeMS)
San Jose highway network: graph with 1016 nodes
325 labeled nodes with known traffic speed in miles per hour
Use 250 labeled nodes for training data and 75 for test data
Dataset details: Borovitskiy et al. (AISTATS 2021)
Benchmark: Results
Trivial baseline
Trivial baseline
: prediction
: uncertainty
Results
Results
Figure: Uncertainty estimates of a geometric Gaussian process.
This benchmark: geometric GP is best, GNN ensemble fails.
Geometric Gaussian processes
Background: Gaussian processes (GPs)
Gaussian processes — random functions with jointly Gaussian marginals.
Bayesian learning: prior GP + data = posterior GP
Prior GPs are determined by kernels (covariance functions)
— have to be positive semi-definite (PSD),
— not all kernels define "good" GPs.
Background: General-purpose GPs in $\R^d$
Matérn kernels:
$$ \htmlData{class=fragment fade-out,fragment-index=6}{ \footnotesize \mathclap{ k_{\nu, \kappa, \sigma^2}(x,x') = \sigma^2 \frac{2^{1-\nu}}{\Gamma(\nu)} \del{\sqrt{2\nu} \frac{\abs{x-x'}}{\kappa}}^\nu K_\nu \del{\sqrt{2\nu} \frac{\abs{x-x'}}{\kappa}} } } \htmlData{class=fragment d-print-none,fragment-index=6}{ \footnotesize \mathclap{ k_{\infty, \kappa, \sigma^2}(x,x') = \sigma^2 \exp\del{-\frac{\abs{x-x'}^2}{2\kappa^2}} } } $$
$\sigma^2$: variance
$\kappa$: length scale
$\nu$: smoothness
$\nu\to\infty$: RBF kernel (Gaussian, heat, diffusion)

$\nu = 1/2$

$\nu = 3/2$

$\nu = 5/2$

$\nu = \infty$
Can we generalize these to geometric domains?
Distance-based approach
$$ k_{\infty, \kappa, \sigma^2}(x,x') = \sigma^2\exp\del{-\frac{|x - x'|^2}{2\kappa^2}} $$
$$ k_{\infty, \kappa, \sigma^2}^{(d)}(x,x') = \sigma^2\exp\del{-\frac{d(x,x')^2}{2\kappa^2}} $$
Graph nodes: not PSD for some $\kappa$ unless can be isometrically embedded into a Hilbert space.
Schoenberg (Trans. Am. Math. Soc. 1938).
Manifolds: not PSD for some $\kappa$ (in some cases—for all) unless the manifold is isometric to $\mathbb{R}^d$.
Feragen et al. (CVPR 2015) and Da Costa et al. (SIMODS 2025).

Not PSD on the square graph.

Not PSD on the circle manifold.
Another approach: stochastic partial differential equations
$$ \htmlData{class=fragment,fragment-index=0}{ \ubr{\del{\frac{2\nu}{\kappa^2} - \Delta}^{\frac{\nu}{2}+\frac{d}{4}} f = \c{W}}{\t{Matérn}} } $$
$\Delta$: Laplacian
$\c{W}$: Gaussian white noise
$d$: dimension
Generalizes well
Same inductive biases: stationary and smooth
Implicit: no formula for the kernel
Whittle (ISI 1963)
Lindgren et al. (JRSSB 2011)
Making it explicit:
node sets of graphs
Matérn kernels on weighted undirected graphs
SPDE turns into a stochastic linear system: solution has kernel $$ \htmlData{fragment-index=2,class=fragment}{ k_{\nu, \kappa, \sigma^2}(i, j) = \frac{\sigma^2}{C_{\nu, \kappa}} \sum_{n=0}^{\abs{V}-1} \Phi_{\nu, \kappa}(\lambda_n) \v{f_n}(i)\v{f_n}(j) } $$
$\lambda_n, \v{f_n}$: eigenvalues and eigenvectors of the Laplacian matrix
$$ \htmlData{fragment-index=4,class=fragment}{ \Phi_{\nu, \kappa}(\lambda) = \begin{cases} \htmlData{fragment-index=5,class=fragment}{ \del{\frac{2\nu}{\kappa^2} - \lambda}^{-\nu} } & \htmlData{fragment-index=5,class=fragment}{ \nu\lt\infty : \t{Matérn} } \\ \htmlData{fragment-index=6,class=fragment}{ e^{-\frac{\kappa^2}{2} \lambda} } & \htmlData{fragment-index=6,class=fragment}{ \nu = \infty : \t{heat (sq. exp., RBF)} } \end{cases} } $$
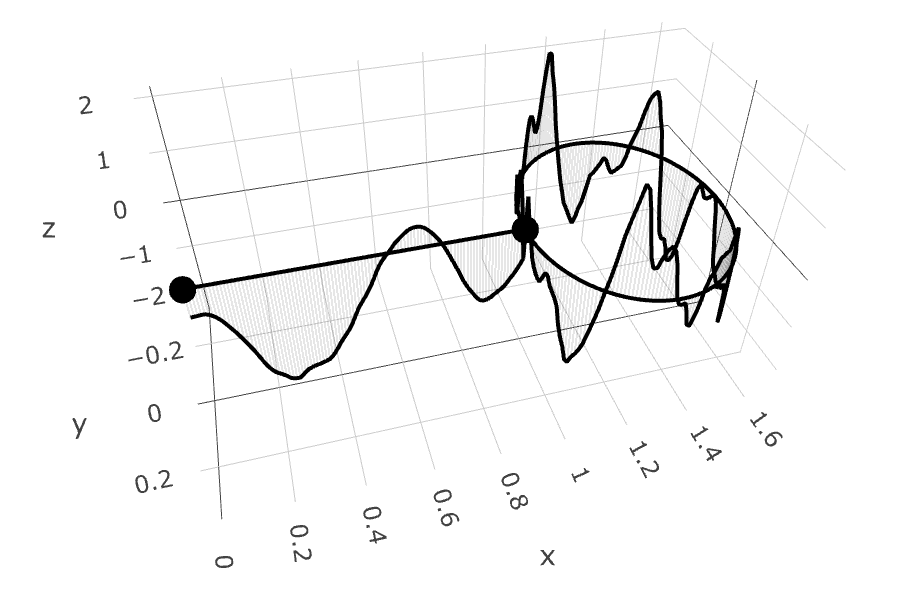
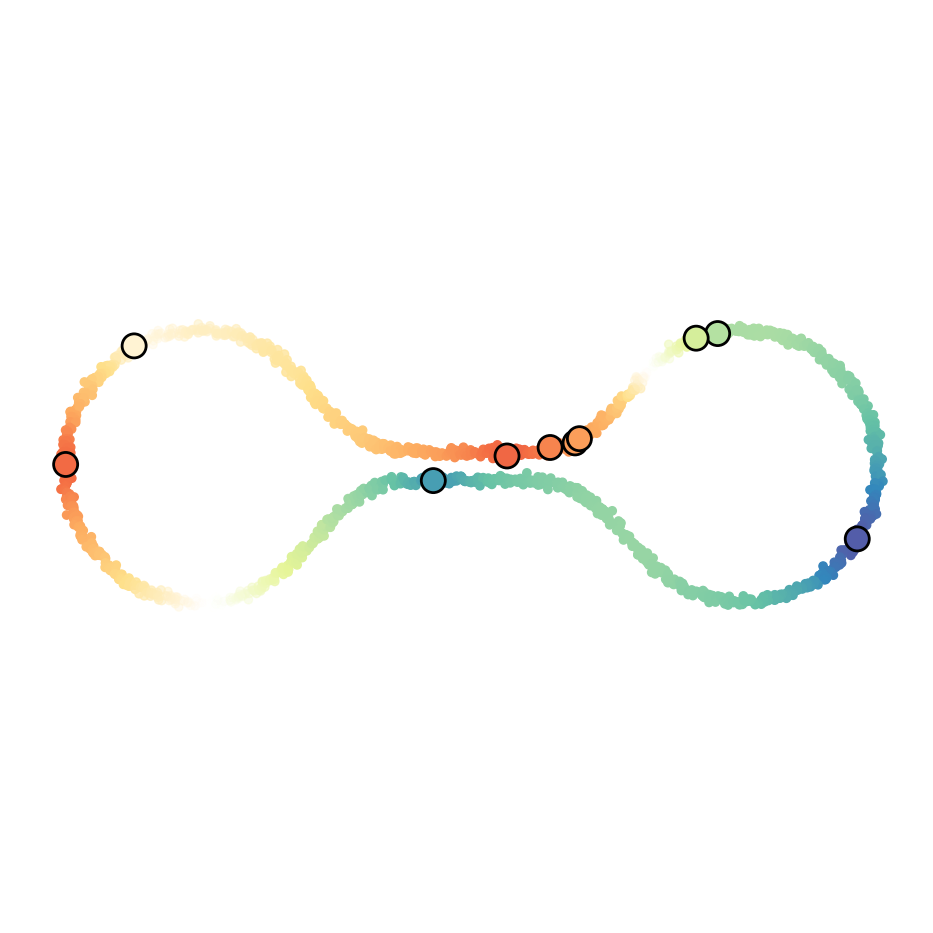
Examples: $k_{5/2}(\htmlStyle{color:rgb(242, 249, 88)!important;}{\bullet},\.)$ on node sets of different graphs



Making it explicit:
Other settings
Making it explicit: Other settings
Compact manifolds: $$ \htmlData{class=fragment}{ \begin{aligned} k_{\nu, \kappa, \sigma^2}(x,x') &= \frac{\sigma^2}{C_{\nu, \kappa}} \sum_{n=0}^\infty \Phi_{\nu, \kappa}(\lambda_n) f_n(x) f_n(x') \\ &= \frac{\sigma^2}{C_{\nu, \kappa}} \sum_{l=0}^\infty \Phi_{\nu, \kappa}(\lambda_l) \underbrace{\sum_{s=1}^{d_s} f_{l, s}(x) f_{l, s}(x')}_{G_l(x, x')} \end{aligned} } $$
Infinite summation where $\lambda_n, f_n$ are Laplace–Beltrami eigenpairs
Addition theorems: more efficient $G_l(x, x')$-based expressions
Making it explicit: Other settings
Non-compact manifolds:
- No summation: instead, integral approximated via Monte Carlo
Spaces of graphs:
- Geometry: make a set of graphs to be a node set of a larger graph
- Then, heat and Matérn kernels are automatically defined
- Larger graph is huge: need clever computational techniques
Gaussian processes:
Various geometric settings
Gaussian processes:
Various geometric settings

Simple manifolds:
meshes, spheres, tori
Borovitskiy et al. (AISTATS 2020)
Compact Lie groups and
homogeneous spaces:
$\small\f{SO}(n)$, resp. $\small\f{Gr}(n, r)$
Azangulov et al. (JMLR 2024)
Non-compact symmetric
spaces: $\small\bb{H}_n$ and $\small\f{SPD}(n)$
Azangulov et al. (JMLR 2024)
Gaussian processes: Various geometric settings
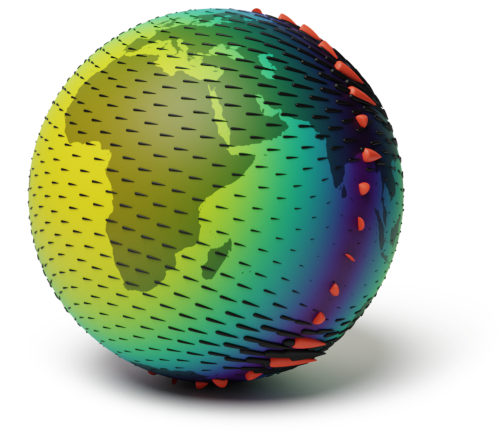
Vector fields on simple manifolds
Robert-Nicoud et al. (AISTATS 2024)
Gaussian processes: Various geometric settings

Edges of graphs
Yang et al. (AISTATS 2024)
Metric graphs
Bolin et al. (Bernoulli 2024)

Cellular Complexes
Alain et al. (ICML 2024)

Spaces of Graphs
Borovitskiy et al. (AISTATS 2023)
Gaussian processes: Various geometric settings
Semi-supervised learning:
scalar functions
Fichera et al. (NeurIPS 2023)
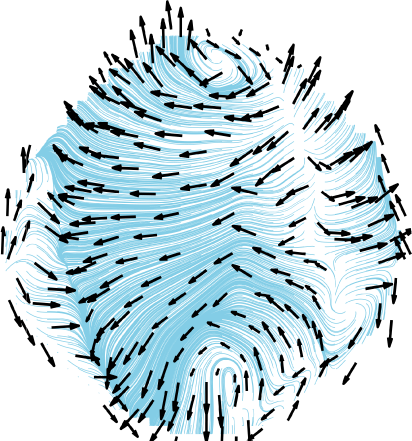
Semi-supervised learning:
vector fields
Peach et al. (ICLR 2024)
Implementation
Implementation

https://geometric-kernels.github.io/

Implementation: Details
Supported spaces:

Supported backends: PyTorch, JAX, TensorFlow, NumPy.
Summary
Summary
Geometric machine learning: increasingly popular
- Waves: kernels on structured data, geometric deep learning
Geometric probabilistic models: emerging research area
- Geometric probabilistic > geometric + probabilistic
- Geometric Gaussian processes: strong off-the-shelf baselines

Thank you!
https://vab.im/
Thank you!
https://vab.im/