Talk at Harvard University
Geometric
Gaussian Processes
Viacheslav Borovitskiy (Slava)


Gaussian process $f$ — random function with jointly Gaussian marginals.
Characterized by
Notation: $f \~ \f{GP}(m, k)$.
The kernel $k$ must be positive (semi-)definite.
Takes
giving the posterior (conditional) Gaussian process $\f{GP}(\hat{m}, \hat{k})$.
The functions $\hat{m}$ and $\hat{k}$ may be explicitly expressed in terms of $m$ and $k$.
$$ \htmlData{fragment-index=0,class=fragment}{ x_0 } \qquad \htmlData{fragment-index=1,class=fragment}{ x_1 = x_0 + f(x_0)\Delta t } \qquad \htmlData{fragment-index=2,class=fragment}{ x_2 = x_1 + f(x_1)\Delta t } \qquad \htmlData{fragment-index=3,class=fragment}{ .. } $$
$$ x_0 \qquad x_1 = x_0 + f(x_0)\Delta t \qquad x_2 = x_1 + f(x_1)\Delta t \qquad .. $$
assume $f$ unknown, model $f$ as a GP.
$$ x_0 \qquad x_1 = x_0 + f(x_0)\Delta t \qquad x_2 = x_1 + f(x_1)\Delta t \qquad .. $$
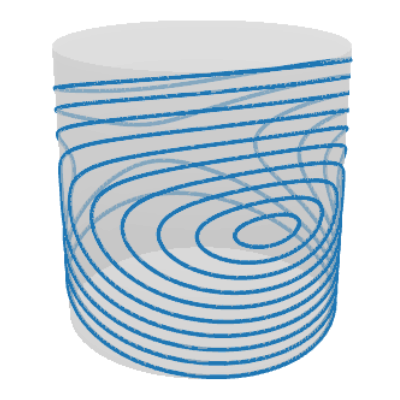

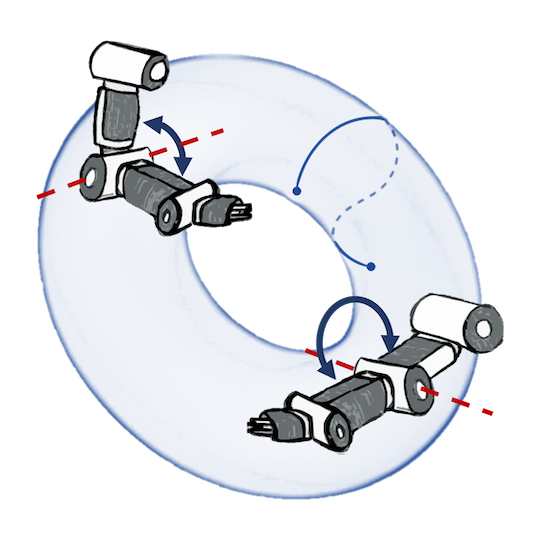
Phase portrait is periodic!
I.e. the state space is actually a cylinder!
Be able to: evaluate $k(x, x')$, differentiate it, sample $\mathrm{GP}(0, k)$.


$$
\htmlData{class=fragment fade-out,fragment-index=6}{
\footnotesize
\mathclap{
k_{\nu, \kappa, \sigma^2}(x,x') = \sigma^2 \frac{2^{1-\nu}}{\Gamma(\nu)} \del{\sqrt{2\nu} \frac{\abs{x-x'}}{\kappa}}^\nu K_\nu \del{\sqrt{2\nu} \frac{\abs{x-x'}}{\kappa}}
}
}
\htmlData{class=fragment d-print-none,fragment-index=6}{
\footnotesize
\mathclap{
k_{\infty, \kappa, \sigma^2}(x,x') = \sigma^2 \exp\del{-\frac{\abs{x-x'}^2}{2\kappa^2}}
}
}
$$
$\sigma^2$: variance
$\kappa$: length scale
$\nu$: smoothness
$\nu\to\infty$: RBF kernel (Gaussian, Heat, Diffusion)

$\nu = 1/2$

$\nu = 3/2$

$\nu = 5/2$

$\nu = \infty$
$$ k_{\infty, \kappa, \sigma^2}(x,x') = \sigma^2\exp\del{-\frac{|x - x'|^2}{2\kappa^2}} $$
$$ k_{\infty, \kappa, \sigma^2}^{(d)}(x,x') = \sigma^2\exp\del{-\frac{d(x,x')^2}{2\kappa^2}} $$
For manifolds. Not well-defined unless the manifold is isometric to a Euclidean space.
(Feragen et al. 2015)
For graphs. Not well-defined unless nodes can be isometrically embedded into a Hilbert space.
(Schonberg, 1930s)
For spaces of graphs. What is a space of graphs?!
$$ \htmlData{class=fragment,fragment-index=0}{ \underset{\t{Matérn}}{\undergroup{\del{\frac{2\nu}{\kappa^2} - \Delta}^{\frac{\nu}{2}+\frac{d}{4}} f = \c{W}}} } $$ $\Delta$: Laplacian $\c{W}$: Gaussian white noise $d$: dimension
Examples: $\bb{S}_d$, $\bb{T}^d$
The solution is a Gaussian process with kernel $$ \htmlData{fragment-index=2,class=fragment}{ k_{\nu, \kappa, \sigma^2}(x,x') = \frac{\sigma^2}{C_{\nu, \kappa}} \sum_{n=0}^\infty \Phi_{\nu, \kappa}(\lambda_n) f_n(x) f_n(x') } $$
Discretize the Problem
— works for general manifolds of very low dimension,
— see «Matérn Gaussian processes on Riemannian manifolds», NeurIPS 2020.
Use Algebraic Structure
— works for homogenous spaces (e.g. $\mathbb{S}_d$ or $\mathrm{SO}(n)$) of higher dimension,
— see «Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces I», under review at JMLR, 2023.

Circle
(Lie group)
Sphere
(homogeneous space)

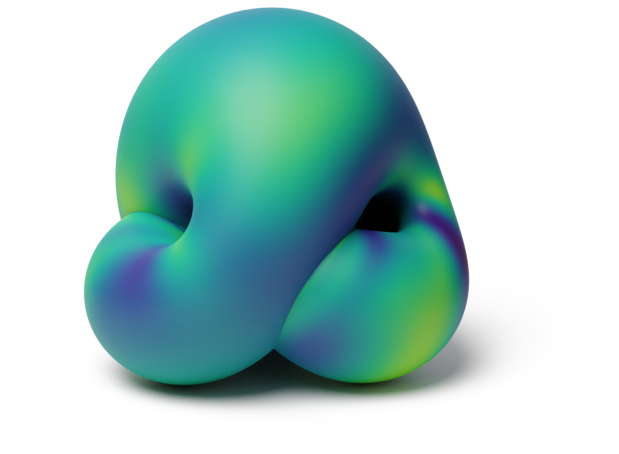
Dragon
(general manifold)
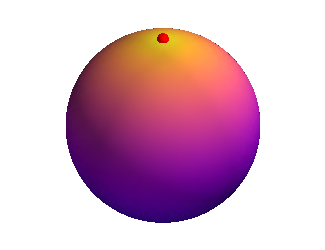
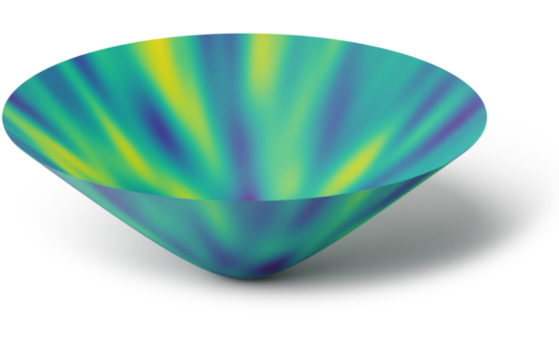
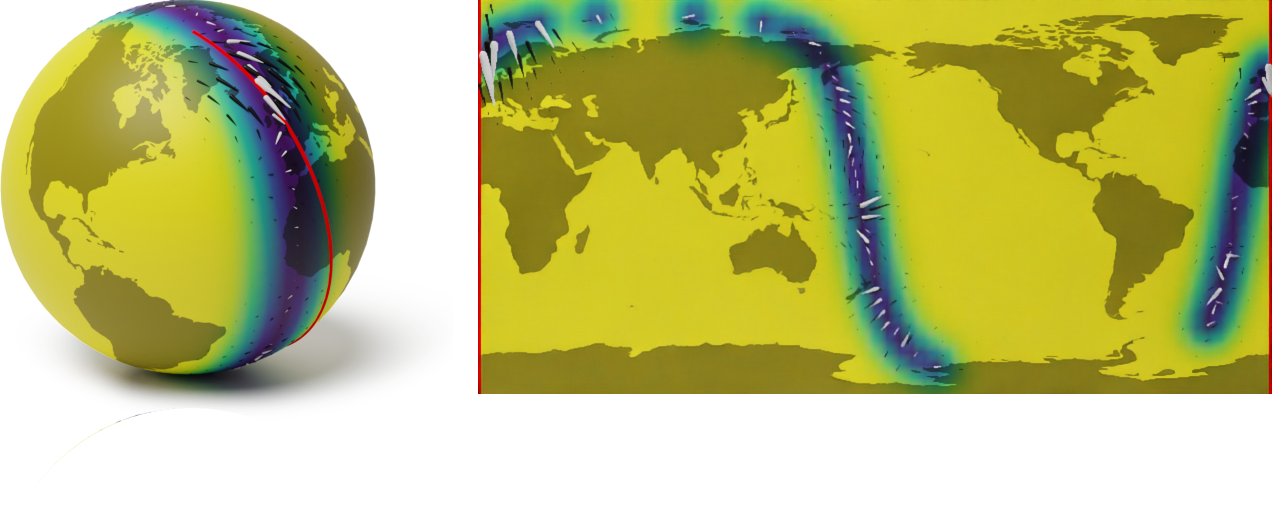
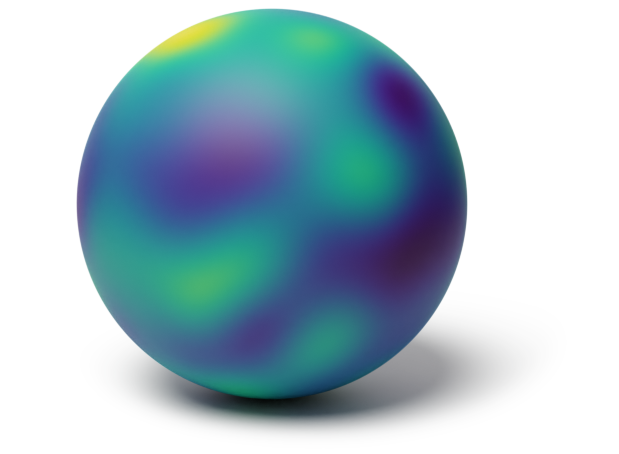 Sphere $\mathbb{S}_2$
Sphere $\mathbb{S}_2$
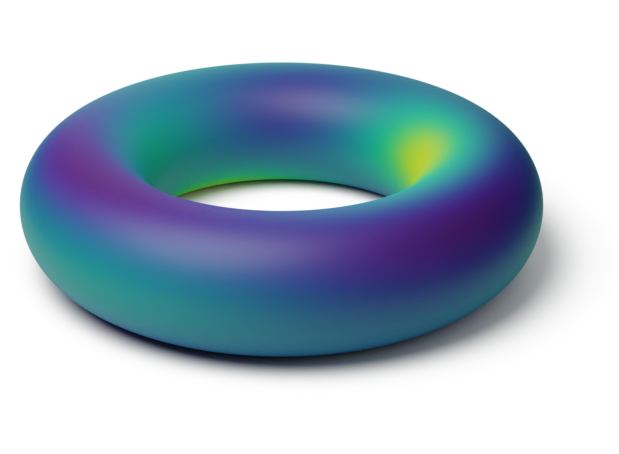 Torus $\mathbb{T}^2 = \bb{S}_1 \x \bb{S}_1$
Torus $\mathbb{T}^2 = \bb{S}_1 \x \bb{S}_1$
 Projective plane $\mathrm{RP}^2$
Projective plane $\mathrm{RP}^2$
Examples: $\bb{H}_d$, $\mathrm{SPD}(d)$
For symmetric spaces like $\bb{H}_d$, $\mathrm{SPD}(d)$ harmonic analysis generalizes well.
This allows to generalize random Fourier features to this setting.
— a few technical challenges arise though.
— see «Stationary Kernels and Gaussian Processes on Lie Groups and their Homogeneous Spaces II»—under review at JMLR, 2023.
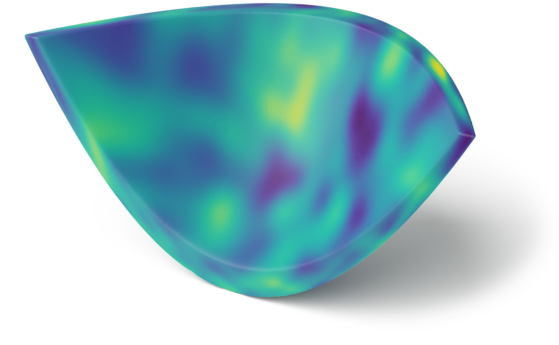
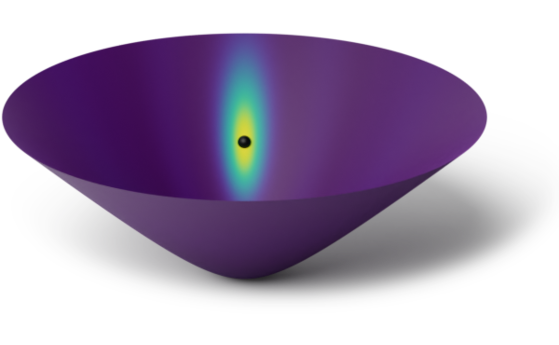 Hyperbolic space $\bb{H}_2$
Hyperbolic space $\bb{H}_2$
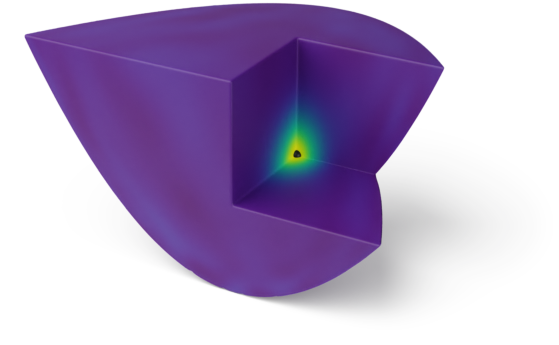
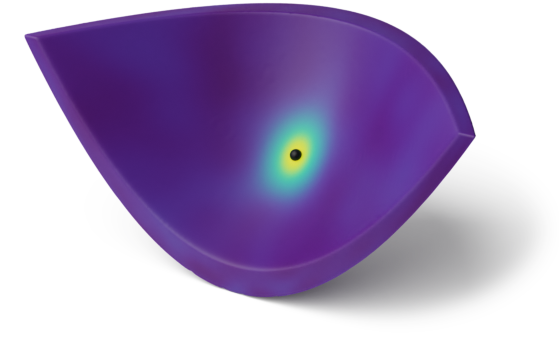
Space of positive definite matrices $\f{SPD}(2)$
 Hyperbolic space $\bb{H}_2$
Hyperbolic space $\bb{H}_2$
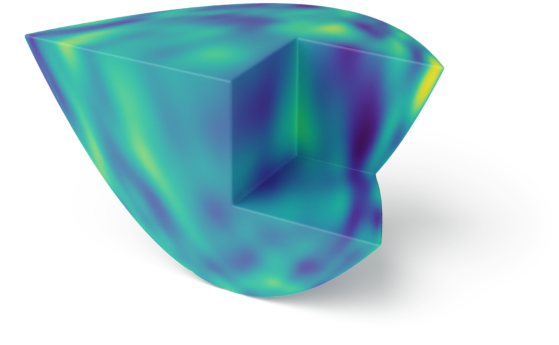
Space of positive definite matrices $\f{SPD}(2)$

Geometry-aware vs Euclidean
SPDE turns into a stochastic linear system. The solution has kernel $$ \htmlData{fragment-index=2,class=fragment}{ k_{\nu, \kappa, \sigma^2}(i, j) = \frac{\sigma^2}{C_{\nu, \kappa}} \sum_{n=0}^{\abs{V}-1} \Phi_{\nu, \kappa}(\lambda_n) \mathbf{f_n}(i)\mathbf{f_n}(j) } $$


Consider the set of all unweighted graphs with $n$ nodes.
It is finite!
How to give it a geometric structure?
Make it into a space?

Beyond functions of actual graphs $f\big(\smash{\includegraphics[height=2.5em,width=1.0em]{figures/gg2.svg}}\big)$, it is useful to consider functions of equivalence classes of graphs: $f\big(\big\{\smash{\includegraphics[height=2.5em,width=1.0em]{figures/gg2.svg}}, \smash{\includegraphics[height=2.5em,width=1.0em]{figures/gg3.svg}}, \smash{\includegraphics[height=2.5em,width=1.0em]{figures/gg4.svg}}\big\}\big)$.