R:SS Workshop on Geometry and Topology in Robotics
Gaussian Processes
on Riemannian Manifolds for Robotics
Alexander Terenin and Viacheslav Borovitskiy


Definition. A Gaussian process is random function $f : X \to \R$ such that for any $x_1,..,x_n$, the vector $f(x_1),..,f(x_n)$ is multivariate Gaussian.
Every GP is characterized by a mean $\mu(\.)$ and a kernel $k(\.,\.)$. We have $$ \htmlClass{fragment}{ f(\v{x}) \~ \f{N}(\v{\mu}_{\v{x}},\m{K}_{\v{x}\v{x}}) } $$ where $\v\mu_{\v{x}} = \mu(\v{x})$ and $\m{K}_{\v{x}\v{x}'} = k(\v{x},\v{x}')$.
Bayesian learning: $f \given \v{y}$.
Goal: minimize unknown function $\phi$ in as few evaluations as possible.
Automatic explore-exploit tradeoff.




















$$ \htmlData{fragment-index=0,class=fragment}{ x_0 } \qquad \htmlData{fragment-index=1,class=fragment}{ x_1 = x_0 + f(x_0)\Delta t } \qquad \htmlData{fragment-index=2,class=fragment}{ x_2 = x_1 + f(x_1)\Delta t } \qquad \htmlData{fragment-index=3,class=fragment}{ .. } $$
$$
\htmlData{class=fragment fade-out,fragment-index=9}{
\footnotesize
\mathclap{
k_\nu(x,x') = \sigma^2 \frac{2^{1-\nu}}{\Gamma(\nu)} \del{\sqrt{2\nu} \frac{\norm{x-x'}}{\kappa}}^\nu K_\nu \del{\sqrt{2\nu} \frac{\norm{x-x'}}{\kappa}}
}
}
\htmlData{class=fragment d-print-none,fragment-index=9}{
\footnotesize
\mathclap{
k_\infty(x,x') = \sigma^2 \exp\del{-\frac{\norm{x-x'}^2}{2\kappa^2}}
}
}
$$
$\sigma^2$: variance
$\kappa$: length scale
$\nu$: smoothness
$\nu\to\infty$: recovers squared exponential kernel

$\nu = 1/2$

$\nu = 3/2$

$\nu = 5/2$

$\nu = \infty$
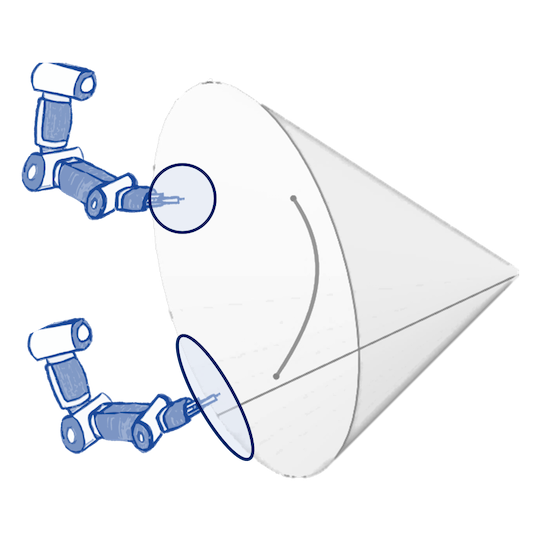
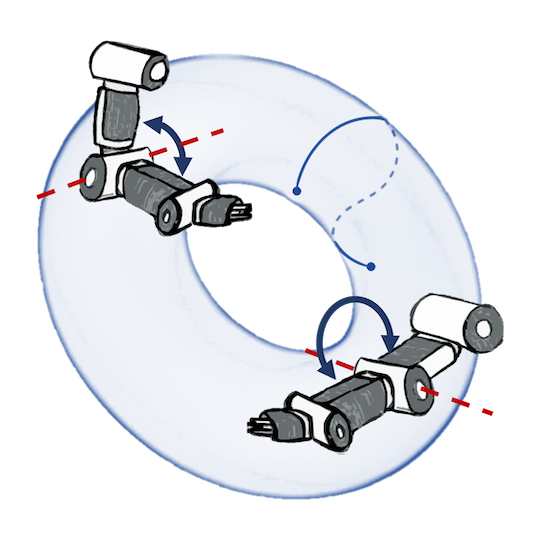
$$ k_\infty^{(d_g)}(x,x') = \sigma^2\exp\del{-\frac{d_g(x,x')^2}{2\kappa^2}} $$
Theorem. (Feragen et al.) Let $M$ be a complete Riemannian manifold without boundary. If $k_\infty^{(d_g)}$ is positive semi-definite for all $\kappa$, then $M$ is isometric to a Euclidean space.
$$ \htmlData{class=fragment,fragment-index=0}{ \underset{\t{Matérn}}{\undergroup{\del{\frac{2\nu}{\kappa^2} - \Delta}^{\frac{\nu}{2}+\frac{d}{4}} f = \c{W}}} } \qquad \htmlData{class=fragment,fragment-index=1}{ \underset{\t{squared exponential}}{\undergroup{\vphantom{\del{\frac{2\nu}{\kappa^2} - \Delta}^{\frac{\nu}{2}+\frac{d}{4}}} e^{-\frac{\kappa^2}{4}\Delta} f = \c{W}}} } $$ $\Delta$: Laplacian $\c{W}$: (rescaled) white noise
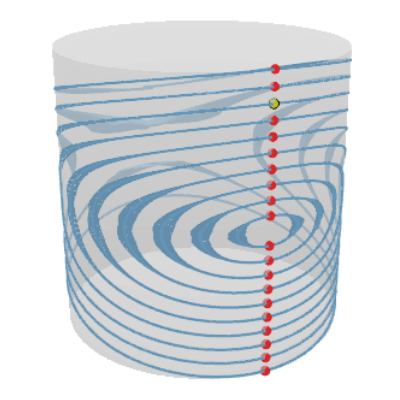
$$ k_\nu(x,x') = \frac{\sigma^2}{C_\nu} \sum_{n=0}^\infty \del{\frac{2\nu}{\kappa^2} - \lambda_n}^{-\nu-\frac{d}{2}} f_n(x) f_n(x') $$

















V. Borovitskiy, I. Azangulov, A. Terenin, P. Mostowsky, M. P. Deisenroth. Matérn Gaussian Processes on Graphs. Artificial Intelligence and Statistics, 2021.
V. Borovitskiy, A. Terenin, P. Mostowsky, M. P. Deisenroth. Matérn Gaussian Processes on Riemannian Manifolds. Advances in Neural Information Processing Systems, 2020.